请输入关键词
产品信息
产品信息
新闻资讯
资料中心
热门搜索:
传感器
首 页
关于玉崎
新闻资讯
产品中心
经典案例
资料中心
联系我们
首页
>
新闻资讯
>
行业动态
新闻资讯
企业资讯
行业动态
联系我们
京都玉崎株式会社
深圳市京都玉崎电子有限公司
Tel:0755-28578111
Fax:0755-28578000
Email:info@tamasaki.com
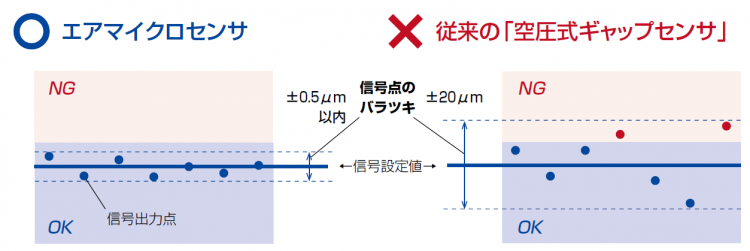
机器人工作精度差异引起的问题
精度差异引起的问题
当使用“气隙传感器”进行高精度就座确认时,精度不稳定且信号点发生变化。
所以
即使有轻微的隆起,也会给出就位成功的信号,并造成加工缺陷。
尽管成功就座,但由于就座失败信号而发生短暂停止。
等情况都会发生。
另一方面,可以通过使用“
空气微传感器
”来防止这些问题。
上一篇:
定位开关于印刷机的应用
下一篇:
柱塞的使用特点